新闻资讯
工业机器人4大巨头、3大核心部件、9大精准选型原则,看完秒懂
工业机器人广泛使用在产业制造上,汽车制造、电器、食品等,能替代反复机器式操纵工作,工业机器人产业的兴起对就业结构、就业形态、就业质量及就业制度产生划时代的影响。在我国,随着劳动年龄人口下降,劳动力供给速度趋缓,“招工难”现象逐渐凸显,人工智能带动的“机器换人”成为缓解用工紧张的有效途径,工业机器人系统运维员成为2019年人社部公布的新职业之一。
VR仿真截屏来源于100唯尔教育《工业机器人技术》VR仿真课程
一、工业机器人4大巨头
发那科、库卡、ABB、安川电机为代表的四大家族,在亚洲市场,它们同样举足轻重,更占据有中国机器人产业70%以上的市场份额。
1.ABB工业机器人:算法最好,但略贵
ABB讲究机器人的整体特性,在重视品质的同时也讲究机器人的设计,但众所周知的是,配备高标准控制系统的ABB机器人价格都很贵。此外,有不少的企业反应在四大主力品牌中,ABB的交货期是最长的。

2.库卡(KUKA)工业机器人:操作简单,但故障率较高
库卡就算是完全没有技术基础的小白一天之内就可以上手操作;在人机界面上,为了迎合中国人的习惯,库卡做得很简单,就像玩游戏机一样好用。但相对于ABB、发那科等机器人,库卡机器人的返修率是较高的,几乎每天都有一台机器人出故障。
3.发那科(FANUC):精度非常高,但过载不行
将在数控系统的优势用于机器人身上,发那科的工业机器人精度也很高,据悉,发那科的多功能六轴小型机器人的重复定位精度可以达到正负0.02mm。但在满负载运行的过程中,当速度达到80%的时候,发那科的机器人就会报警,这说明了发那科机器人的过载能力并不是很好。
4.安川电机( YASKAWA ):稳定性好,但精度略差
安川的机器人最大的特点就是负载大,稳定性高,在满负载满速度运行的过程中不会报警,甚至能够过载运行。安川机器人价格优势明显,可以说是四大品牌中价格最低,性价比较高。
二、工业机器人3大核心部件
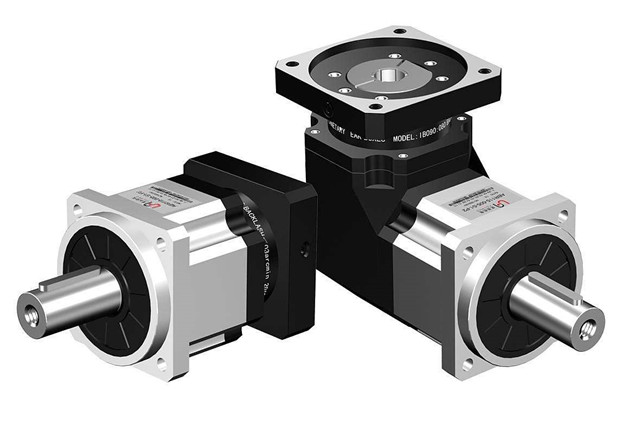
1.减速器
目前市面上的大量应用在工业机器人上的减速器主要有两类:RV减速器和谐波减速器。
RV减速器:是少齿差啮合,但相对于谐波减速器,RV减速器通常用的是摆线针轮,RV减速器由摆线针轮和行星支架组成。相比谐波减速器,RV减速器的关键在于加工工艺和装配工艺。RV减速器具有更高的疲劳强度、刚度和寿命,不像谐波传动那样随着使用时间增长,运动精度会显著降低,其缺点是重量重,外形尺寸较大。RV减速器用于转矩大的机器人腿部腰部和肘部三个关节,负载大的工业机器人,一二三轴都是用RV减速器。
谐波减速器:是谐波传动装置的一种,谐波传动装置包括谐波加速器和谐波减速器。谐波减速器主要包括:刚轮、柔轮、和径向变形的波发生器三者组成。它是利用柔性齿轮产生可控制的弹性变形波,引起刚轮与柔轮的齿间相对错齿来传递动力和运动。这种传动与一般的齿轮传递具有本质上的差别,在啮合理论、集合计算和结构设计方面具有特殊性。谐波齿轮减速器具有高精度、高承载力等优点,和普通减速器相比,由于使用的材料要少50%,其体积及重量至少减少1/3。所以谐波减速机主用于小型机器人,特点是体积小、重量轻、承载能力大、运动精度高,单级传动比大。一般用于负载小的工业机器人或大型机器人末端几个轴。
2.伺服系统
伺服驱动器又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位。
3.控制器
机器人控制系统是机器人的大脑,是决定机器人功用和功能的主要要素。控制系统是按照输入的程序对驱动系统和实行机构收回指令信号,并进行控制。工业机器人控制技术的主要任务便是控制工业机器人在工作空间中的活动范围、姿势和轨迹、动作的时间等。具有编程简单、软件菜单操纵、友好的人机交互界面、在线操纵提示和运用方便等特点。
三、工业机器人怎么选型
1.有效负载
有效负载是,机器人在其工作空间可以携带的最大负荷。从例如3Kg到1300Kg不等。
如果你希望机器人完成将目标工件从一个工位搬运到另一个工位,需要注意将工件的重量以及机器人手爪的重量加总到其工作负荷。
另外特别需要注意的是机器人的负载曲线,在空间范围的不同距离位置,实际负载能力会有差异。
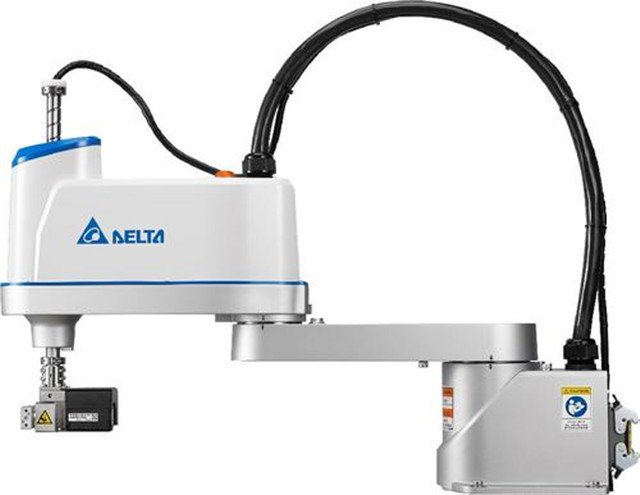
2.工业机器人应用行业
你的机器人要用于何处是你选择需要购买的机器人种类时的首要条件。如果你只是要一个紧凑的拾取和放置机器人,scara机器人是不错的选择。如果想快速放置小型物品,Delta机器人是最好的选择。如果你想机器人在工人旁边一起工作,你就应该选择协作机器人。
3.最大作动范围
当评估目标应用场合的时候,应该了解机器人需要到达的最大距离。选择一个机器人不是仅仅凭它的有效载荷-也需要综合考量它到达的确切距离。每个公司都会给出相应机器人的作动范围图,由此可以判断,该机器人是否适合于特定的应用。机器人的水平运动范围,注意机器人在近身及后方的一片非工作区域。
机器人的最大垂直高度的量测是从机器人能到达的最低点(常在机器人底座以下)到手腕可以达到的的最大高度的距离(Y)。最大水平作动距离是从机器人底座中心到手腕可以水平达到的最远点的中心的距离(X)。
4.速度
这个参数与每一个用户息息相关。事实上,它取决于在该作业需要完成的Cycle Time。规格表列明了该型号机器人最大速度,但我们应该知道,考量从一个点到另一个点的加减速,实际运行的速度将在0和最大速度之间。这项参数单位通常以度/秒计。有的机器人制造商也会标注机器人的最大加速度。
5.刹车和转动惯量
基本上每个机器人制造商提供他们的机器人制动系统的信息。有些机器人对所有的轴配备刹车,其他的机器人型号不是所有的轴都配置刹车。要在工作区中确保精确和可重复的位置,需要有足够数量的刹车。另外一种特别情况,意外断电发生的时候,不带刹车的负重机器人轴不会锁死,有造成意外的风险。
同时,某些机器人制造商也提供机器人的转动惯量。其实,对于设计的安全性来说,这将是一个额外的保障。你可能还注意到不同轴上的适用的扭矩。例如,如果你的动作需要一定量的扭矩以正确完成工作,你需要检查,在该轴上适用的最大扭矩是否正确的。如果选型不正确,机器人则可能由于过载而Down机。
5.防护等级
这个也取决于机器人的应用时所需要的防护等级。机器人与食品相关的产品、实验室仪器、医疗仪器一起工作或者处在易燃的环境中,其所需的防护等级各有不同。这是一个国际标准,需要区分实际应用所需的防护等级,或者按照当地的规范选择。一些制造商会根据机器人工作的环境不同而为同型号的机器人提供不同的防护等级。
6.自由度(轴数)
机器人轴的数量决定了其自由度。如果只是进行一些简单的应用,例如在传送带之间拾取放置零件,那么4轴的机器人就足够了。如果机器人需要在一个狭小的空间内工作,而且机械臂需要扭曲反转,6轴或者7轴的机器人是最好的选择。轴的数量选择通常取决于具体的应用。需要注意的是,轴数多一点并不只为灵活性。事实上,如果你在想把机器人还用于其它的应用,你可能需要更多的轴,“轴”到用时方恨少。不过轴多的也有缺点,如果一个6轴的机器人你只需要其中的4轴,你还是得为剩下的那2个轴编程。

7.机器人重量
机器人重量对于设计机器人单元也是一个重要的参数。如果工业机器人需要安装在定制的工作台甚至轨道上,你需要知道它的重量并设计相应的支撑。
8.重复精度
这个参数的选择也取决于应用。重复精度是机器人在完成每一个循环后,到达同一位置的精确度/差异度。通常来说,机器人可以达到0.5mm以内的精度,甚至更高。例如,如果机器人是用于制造电路板,你就需要一台超高重复精度的机器人。如果所从事的应用精度要求不高,那么机器人的重复精度也可以不用那么高。精度在2D视图中通常用“±”表示。实际上,由于机器人并不是线性的,其可以在公差半径内的任何位置。
以上,就是100唯尔教育关于工业机器人的部分内容。