新闻资讯
工业机器人和数控机床是怎么配合工作的
我们常说团结就是力量,只有相互配合,才能把工作做得更加完美。这不仅仅适用于人类。
工业机器人和数控机床也是一样的,也是需要相互配合才能做好工作,提高工厂的生产效率。
所以今天要学习的是工业机器人和数控机床是怎么配合工作的?以FANUC机器人为例。
FANUC机器人在电机外壳加工生产线上的应用过程,采用机器人自动上下料技术及利用iRVision视觉系统,合理地规划机器人运动轨迹,把工业机器人搬运技术及数控机床加工技术有机地组合起来,实现自动装卸工件、自动码放加工成品,实现产品的高精度、高效率和低成本加工。
1、FANUC机器人
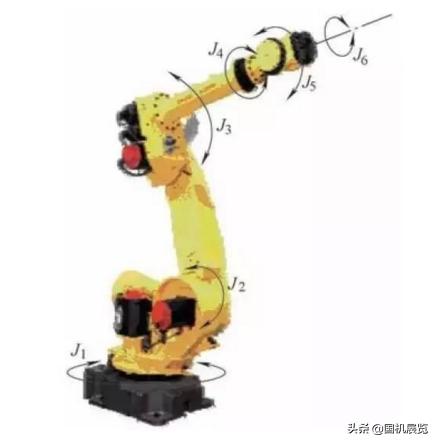
自动加工生产线配置了两台FANUC Robot M-20iA搬运系统机器人,其中一台机器人作为行走机器人R1,使用FANUC伺服电动机αiF12/3000控制,通过精密减速机、齿轮及齿条进行传动,重复精度高,可以轻松适应机床在导轨两侧布置的方案。
主要用于毛坯工件的抓取、机床上料、加工工序间工件抓取以及加工成品卸除并运送到传输带上。
另一台固定机器人R2结合FANUC独有的智能机器人技术(iRVision视觉功能),用于下料,在料筐里码放加工成品。
FANUC Robot M-20iA机器人各环节每一个结合处为一个关节点或坐标系,其外形及各关节位置如下图所示。
2、自动加工线设备布置
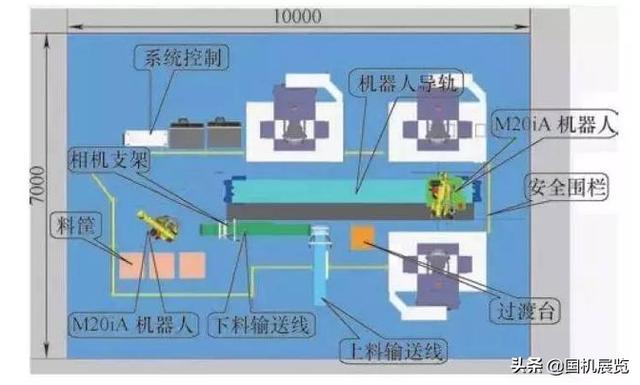
电机外壳自动加工生产线由上料输送带和下料输送带(分别配置iRVision视觉系统)、行走机器人R1(导轨式)、固定机器人R2、两台VM850立式加工中心、一台CLX360数控车床、成品料筐和系统控制柜等组成,各设备布置如下图所示。
3、 数控加工工艺
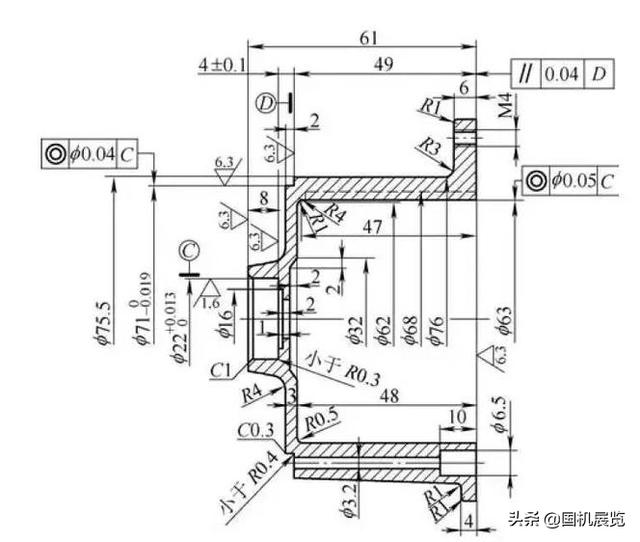
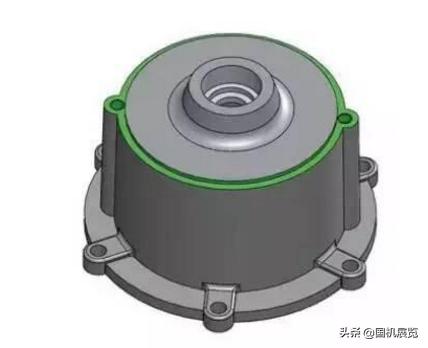
工件为电机外壳, 如下图所示, 为大批量生产, 材料是ADC12铝合金。加工内容包含端面铣削钻孔、攻螺纹和内孔车削等内容。
零件加工工序内容分配如下:
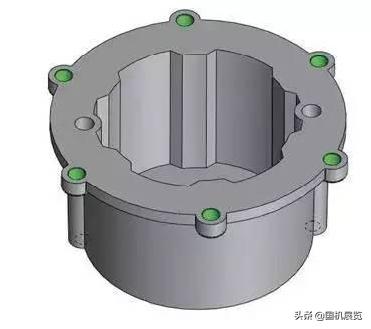
(1)VM850立式加工中心1进行M4螺纹底孔钻孔、M4螺纹攻螺纹及铣削外圆凸台工序加工,如下图所示。
(2)VM850加工中心2进行钻6个φ 5.5mm的通孔、孔口倒角工序加工,如下图所示。
(3)CLX360数控车床进行内孔及台阶孔、孔口倒角工序加工,如下图所示。

此外, 还需要设计专用夹具, 加工中心夹具采用内夹方式,数控车床采用外夹方式。
4、机器人自动上下料动作设计
根据工件的外形特点设计机器人气动手爪部件,包含气动、传感器及机械部件等。工件加工工艺流程如下:
①毛坯工件摆放在上料传送带上。
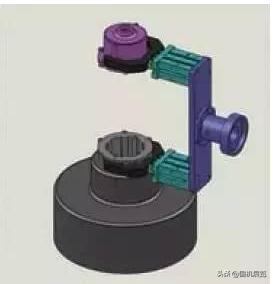
②行走机器人R1复合手爪抓取毛坯工件,行走到加工中心位置,将工件安装到加工中心的专用夹具上,如下图所示。

③待加工中心1加工完成后,行走机器人R1复合手爪取下工件,行走到加工中心2位置,将工件安装到加工中心2的专用夹具上,如下图所示。
④待加工中心2加工完成后,行走机器人R1取下工件到数控车床位置,将工件安装到专用夹具上,如图9所示。待工件加工完成后取下工件,机器人行走到工件翻转台位置,进行工件翻转、交换,如下图所示。
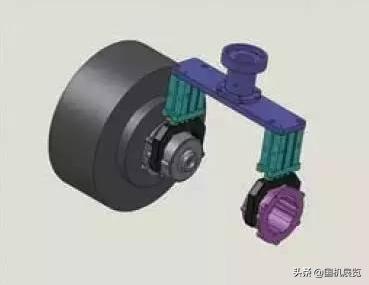
⑤工件在翻转台进行交换后,机器人R1把加工成品放置在下料传送带上,如图11所示,由机器人R2进行工件下料、自动码放在成品料筐中,如下图所示。
至此, 结束一个完整的加工流程。各加工工序有相应的节拍,经过调整CNC加工程序以及机器人动作程序后,可实现数控机床加工与机器人上下料的完美组合。
5、 专用夹具设计
依据三台数控机床各自的加工工序任务,设计三套组合气动夹具,介绍如下。
(1)立式加工中心1专用夹具:立式加工中心1进行钻孔、攻,如下图所示。
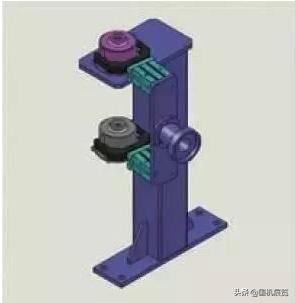
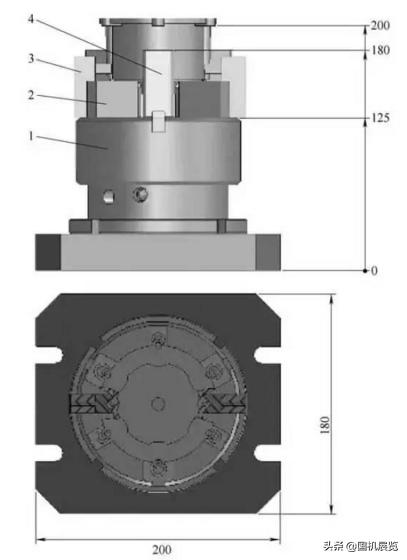
(2) 立式加工中心2 专用夹具:立式加工中心2进行钻6个φ 5.5mm的通孔、孔口倒角工序加工,设计以气动三爪自定心卡盘夹紧工件,以两个弹性V形块定向的夹具,如下图所示。
1.启动卡盘 2.支承块 3.弹性V形块 4.特制卡爪
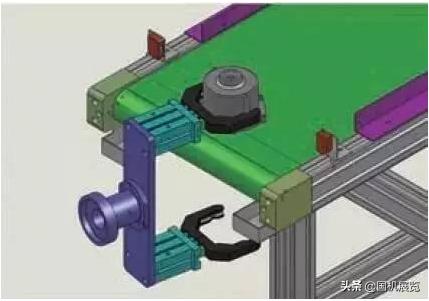
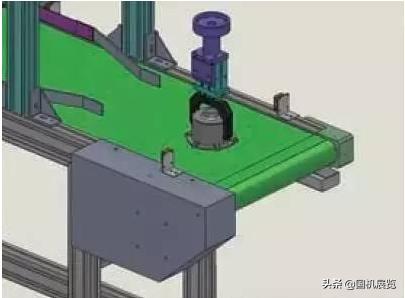
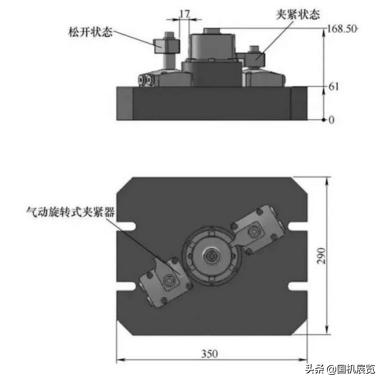
(3)数控车床专用夹具:数控车床进行内孔及台阶孔、孔口倒角工序加工,设计以一面两销定位工件、以气动旋转夹紧器夹紧方式的夹具。
6 、机器人、P LC与数控机床的接口
为保证机器人与数控机床的安全配合,要建立机器人、PLC以及数控机床之间安全可靠的通信连接。
在硬件方面,通过屏蔽电缆将三者之间相应的输入与输出点进行连接。软件方面,通过机器人专用软件、PLC接口,采集机床和机器人当前状态,编写相应的符合上下料逻辑的控制程序,最终达到数控机床与机器人的有效通信。
重点需要处置紧急停止信号、数控机床准备完成信号、机器人手爪气动信号、数控机床夹具松夹信号以及安全门信号等,数控机床状态监控画面如下图所示。
1.启动卡盘 2.支承块 3.弹性V形块 4.特制卡爪
(3)数控车床专用夹具:数控车床进行内孔及台阶孔、孔口倒角工序加工,设计以一面两销定位工件、以气动旋转夹紧器夹紧方式的夹具,如图15所示。
6 . 机器人、P LC与数控机床的接口
为保证机器人与数控机床的安全配合,要建立机器人、PLC以及数控机床之间安全可靠的通信连接。在硬件方面,通过屏蔽电缆将三者之间相应的输入与输出点进行连接。软件方面,通过机器人专用软件、PLC接口,采集机床和机器人当前状态,编写相应的符合上下料逻辑的控制程序,最终达到数控机床与机器人的有效通信。重点需要处置紧急停止信号、数控机床准备完成信号、机器人手爪气动信号、数控机床夹具松夹信号以及安全门信号等,数控机床状态监控画面如图16所示。

图15 数控车床夹具

图16 数控机床状态监控画面
7. 结语
随着工业机器人向更深更广方向的发展以及机器人智能化水平的提高,机器人的应用范围还在不断地扩大,工业机器人自动上下料机构作为数控机床辅助部件,越来越受到机床制造商和用户的重视。通过机器人控制系统和机床控制系统之间快速无误的通信,以及机器人运动的精度,可保证系统加工过程的可靠性。
本文所述自动加工生产线,汇集机器人技术、PLC技术、传感器检测技术、通信技术及数控技术等先进技术,实现了工业机器人与数控机床的技术组合,简化了数控机床操作模式,提高了数控机床的操作安全性,降低了工人的劳动强度,工件的上下料及自动加工连接紧密,大大提高了工作效率,具有较好的应用价值。
随着工业机器人的应用越来越广泛,应用技术也越来越高,因此工业机器人自动上下料机构作为数控机床辅助部件,越来越受到机床制造商和用户的重视。
通过机器人和数控机床的紧密配合,保证系统加工过程的紧密性,降低了工人的劳动强度,大大提高了工作效率,具有较好的应用价值。
免责声明:本文系网络转载或改编,版权归原作者所有。如涉及版权,请联系删除!